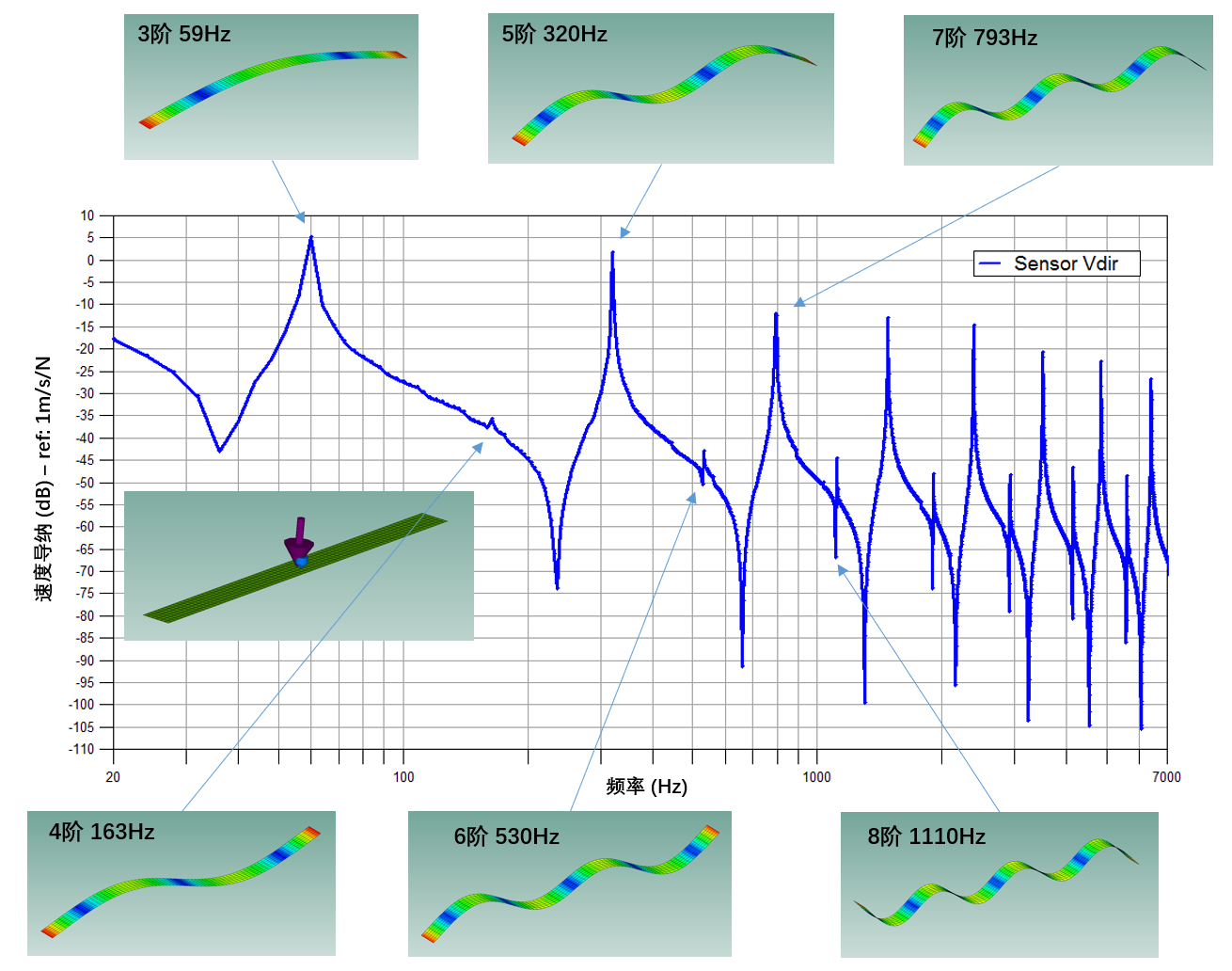
附加质量对自由梁阻尼测试的影响 — 3g的附加质量让共振峰偏移,后续的等效刚度和隔声量都产生巨大的偏差
做自由梁中心点激振法测试阻尼时,很多人会想:"传感器和试件之间的连接件质量才 3g,测试梁有 60g,质量比才 5%,影响可以忽略吧?"
事实是:3g 的附加质量让每一阶共振频率都产生了显著的偏移。
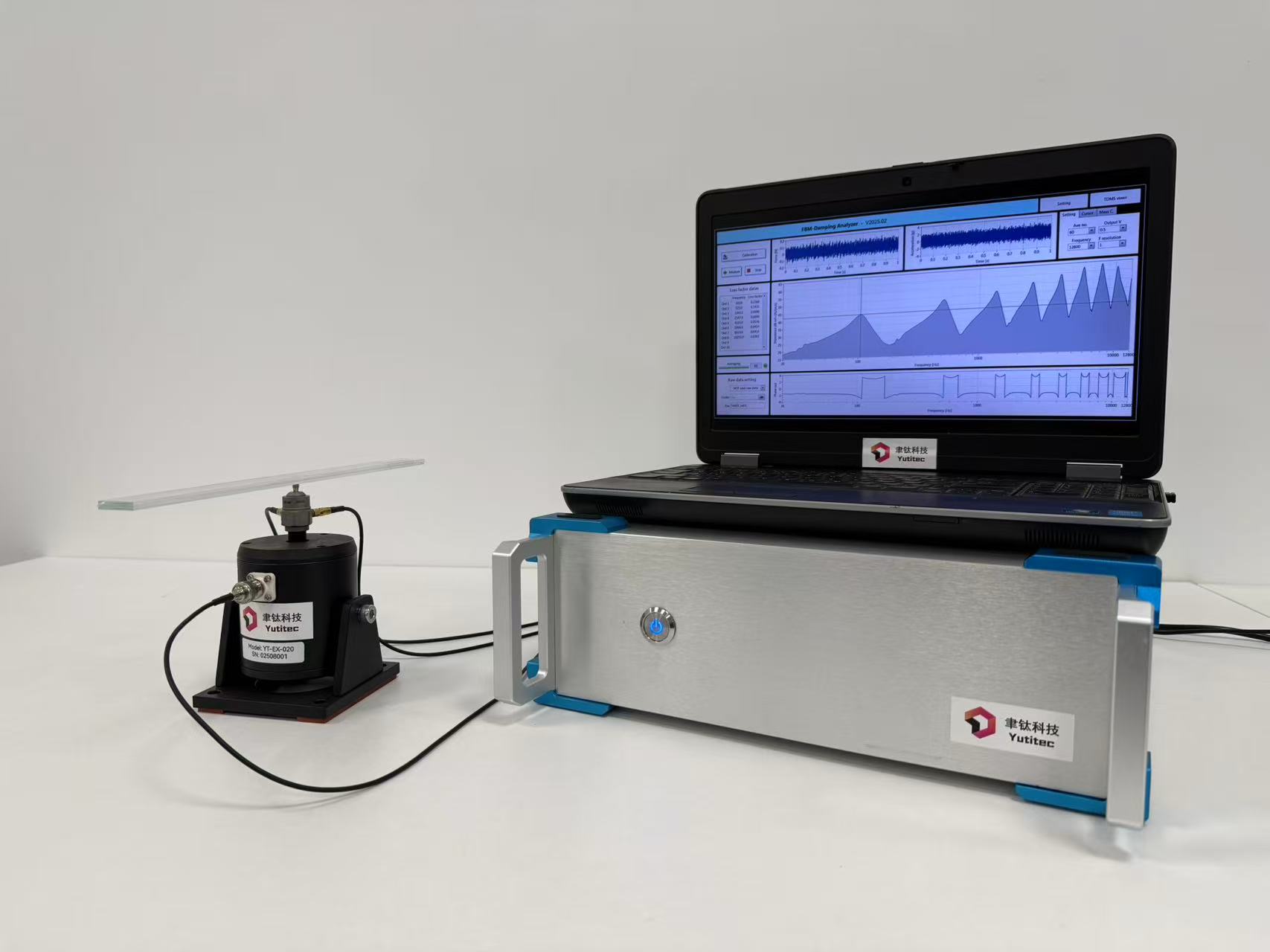
在 ISO 16940 自由-自由梁测试中,我们用中心点激振法测频率响应函数(FRF)。激振器和加速度计贴在梁中心,不可避免地引入了附加质量。本文将展示附加质量如何影响共振频率,以及如何从实测数据中"去掉"这个影响。
一、自由梁激振点处的附加质量
在 ISO 16940 自由-自由梁中心点激振测试中,激振器和加速度计不可避免地粘贴在梁的中心位置。下图对比了理想状态(无附加质量)与实际测试状态(带有附加质量):
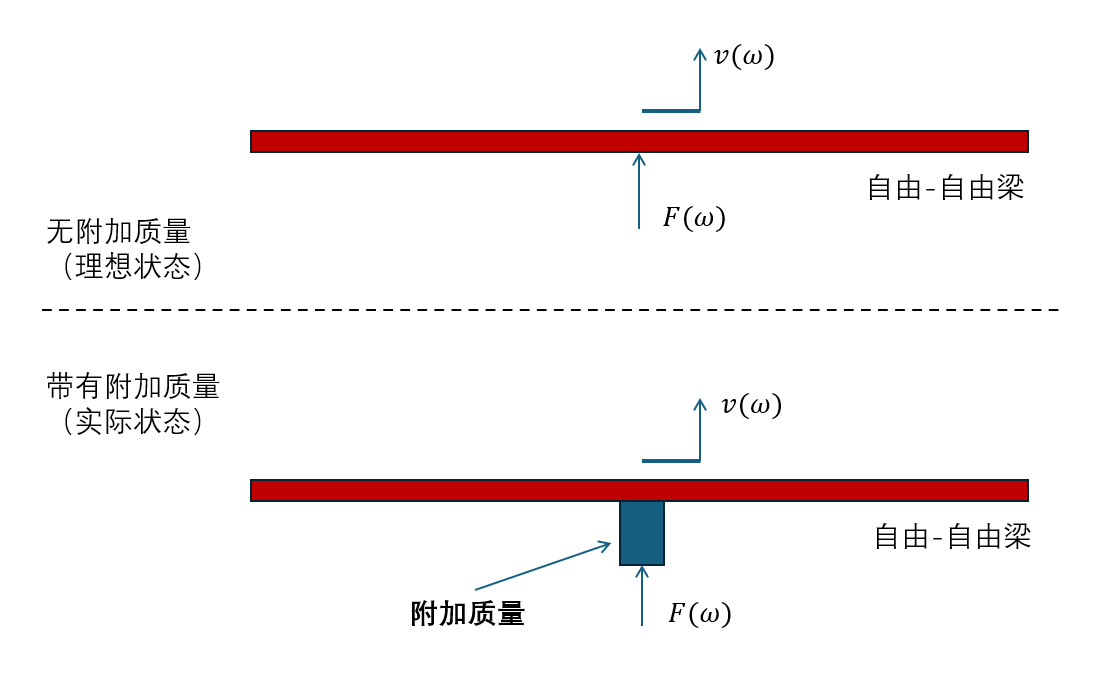
上图:理想状态,激振力 $F(\omega)$ 直接作用于梁体,测量速度响应 $v(\omega)$。
下图:实际状态,阻抗头传感器及其连接件与梁中心进行粘接,激振力需通过一系列的环节传递到梁体。这部分附加质量 $m_a$ 改变了系统的局部惯性,从而影响共振频率。
附加质量主要包括以下部分(注意:并非整个传感器的质量):
- 连接件 — 传感器与自由梁之间的小螺钉或连接块
- 胶粘剂 — 粘接自由梁和螺钉的胶粘剂
- 阻抗头力传感器以上部件 — 阻抗头内部的力传感器以上的质量(力传感器以下的部件不属于附加质量)
在阻抗头测量中,力传感器测量的是传递到梁上的力,因此力传感器以下的部件已经包含在力测量回路中,不属于附加质量。只有力传感器以上、随梁一起振动的质量才构成附加质量。本实验中,上述附加质量合计约 3g,占梁总质量(58.9g)约 5%。
二、仿真结果:附加质量让所有共振峰左移
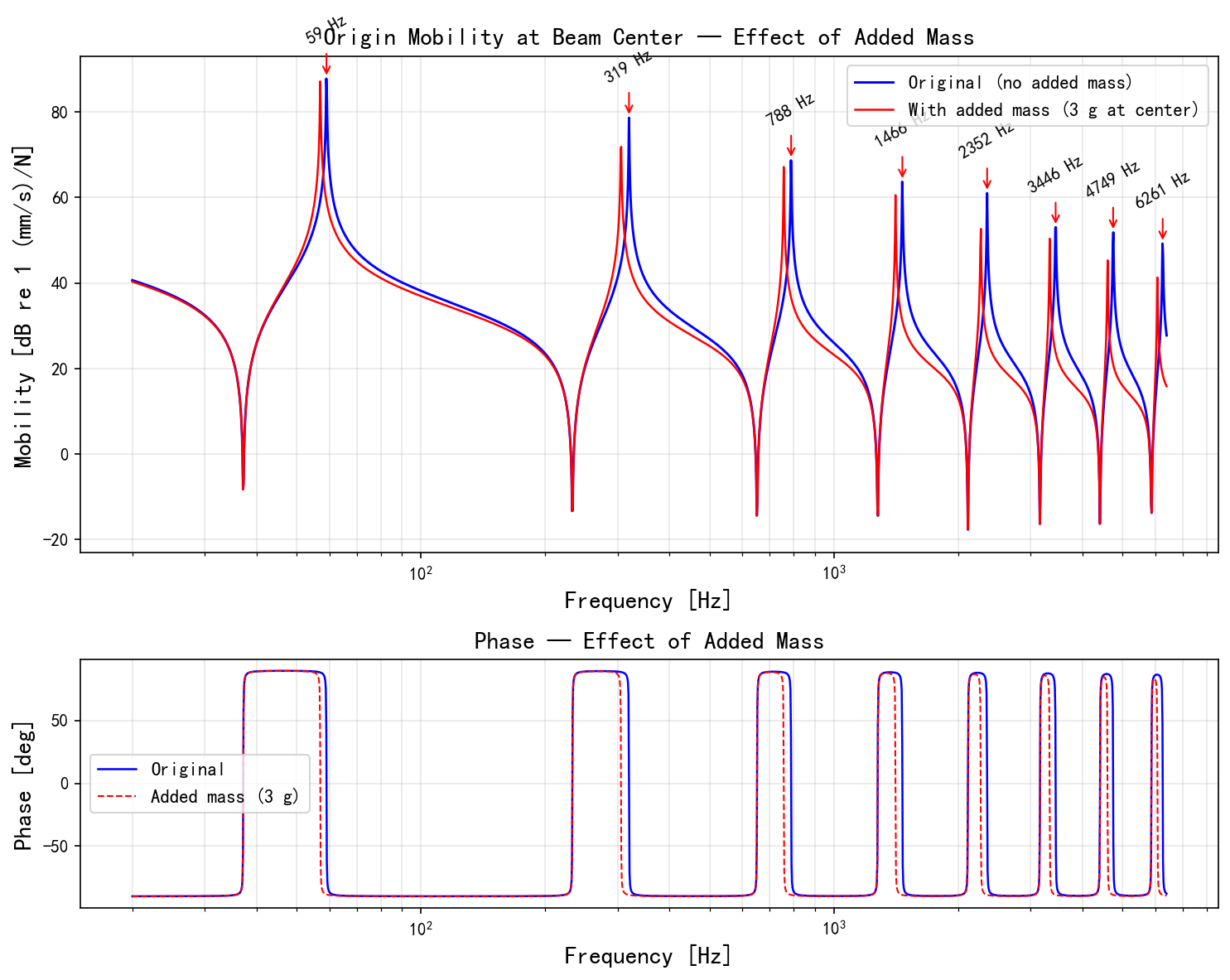
蓝色曲线为原系统,红色曲线为附加 3g 集中质量后的系统。所有共振峰向低频方向移动。附加质量越大,偏移越明显。
频率偏移汇总表(理论计算)
| 模态 | 无附加 f₀ (Hz) | 含附加 f (Hz) | 偏移 Δf (Hz) | 相对偏移 Δf/f₀ |
|---|---|---|---|---|
| Mode 3 | 59.1 | 56.9 | 2.2 | 3.76% |
| Mode 5 | 319.2 | 302.8 | 16.5 | 5.15% |
| Mode 7 | 788.3 | 748.1 | 40.2 | 5.10% |
| Mode 9 | 1465.8 | 1391.1 | 74.7 | 5.10% |
| Mode 11 | 2351.8 | 2232.0 | 119.8 | 5.10% |
| Mode 13 | 3446.3 | 3270.7 | 175.6 | 5.10% |
| Mode 15 | 4749.3 | 4507.3 | 242.0 | 5.10% |
| Mode 17 | 6260.7 | 5941.6 | 319.0 | 5.10% |
以上数据由 Euler-Bernoulli 梁理论计算得出:先通过特征方程 $\cos(\beta L)\cosh(\beta L)=1$ 求解各阶 $\beta_n L$,得到无附加质量固有频率 $f_n$;再通过 $f_n' = f_n\left(1 - \dfrac{m_a\phi_n^2(L/2)}{2M_n}\right)$ 计算附加 3g 质量后的频率。
关键观察
- Mode 3 偏移最小(3.76%) — 因为 Mode 3 在中心点的振型值最小($\phi \approx -1.216$),有效模态质量最大(39.8 g)
- Mode 5 及以上相对偏移稳定在约 5.1% — 高阶模态在中心点的振型值趋于一致($\phi \approx \pm 1.414$),有效模态质量趋于 29.4 g
- 绝对偏移量 Δf 随频率升高而增大 — Mode 17 理论偏移 319 Hz,实测偏移 272 Hz
注:实测频率偏移略大于理论预测(如 Mode 5 实测 6.36% vs 理论 5.15%),可能原因包括实际附加质量略大于 3g(含胶粘剂等未精确称量部分)、粘结层柔度效应等。
三、为什么附加质量会改变共振频率?
3.1 直观理解
想象一根梁在振动,你突然在它上面粘了一块小质量。这块质量跟着梁一起振动,增加了局部惯性。惯性增加 → 系统"变重" → 振动变慢 → 频率降低。
这就像弹簧-质量系统:$f = \frac{1}{2\pi}\sqrt{k/m}$,质量 $m$ 增大,频率 $f$ 降低。
3.2 模态分析视角
在模态分析中,第 $n$ 阶模态的固有频率为:
$$\omega_n = \sqrt{\frac{K_n}{M_n}}$$
其中 $K_n$ 为第 $n$ 阶模态刚度,$M_n$ 为模态质量。
附加质量 $m_a$ 在位置 $x_a$ 处,对第 $n$ 阶模态的贡献为:
$$\Delta M_n = m_a \cdot \phi_n^2(x_a)$$
其中 $\phi_n(x_a)$ 是第 $n$ 阶模态振型在附加质量位置处的值。因此新的固有频率为:
$$\omega_n' = \sqrt{\frac{K_n}{M_n + m_a \phi_n^2(x_a)}}$$
3.3 一阶近似:频率偏移公式
对小质量($m_a \ll M_n$),做泰勒展开:
$$\frac{\omega_n'}{\omega_n} = \sqrt{\frac{M_n}{M_n + m_a \phi_n^2(x_a)}} \approx 1 - \frac{m_a \phi_n^2(x_a)}{2M_n}$$
因此频率的相对变化为:
$$\boxed{\frac{\Delta f_n}{f_n} \approx -\frac{m_a \phi_n^2(x_a)}{2M_n}}$$
这个简洁的公式告诉我们:
- 频率偏移与附加质量 $m_a$ 成正比
- 与振型值 $\phi_n^2(x_a)$ 成正比 — 附加质量贴在波腹(振幅最大处)影响最大
- 与模态质量 $M_n$ 成反比 — 系统越重,影响越小
3.4 自由-自由梁中心点的特殊情况
对于自由-自由梁在中心点($x = L/2$):
- 奇数阶模态(Mode 3, 5, 7, ...)在中心点为波腹($\phi \neq 0$),附加质量影响最大
- 偶数阶模态在中心点为节点($\phi = 0$),附加质量对其无影响
| 模态 | $\phi(L/2)$ | $M_{\text{eff}}$ (g) | 理论 $\Delta f/f_0$ (%) |
|---|---|---|---|
| Mode 3 | -1.216 | 39.8 | -3.77 |
| Mode 5 | 1.422 | 29.1 | -5.15 |
| Mode 7 | -1.414 | 29.5 | -5.09 |
| Mode 9 | 1.414 | 29.4 | -5.10 |
| Mode 11 | -1.414 | 29.4 | -5.10 |
| Mode 13 | 1.414 | 29.4 | -5.10 |
| Mode 15 | -1.414 | 29.4 | -5.10 |
| Mode 17 | 1.414 | 29.4 | -5.10 |
有效模态质量 $M_{\text{eff}} = M_{\text{total}} / \phi_n^2(L/2)$,其中 $M_{\text{total}} = 58.875$ g。Mode 3 的有效质量最大(39.8 g),其余高阶模态趋于一致(约 29.4 g)。有效质量越小,相同附加质量引起的频率偏移越大。
四、如何去除附加质量的影响?
4.1 核心思路
已知:实测导纳 $Y_{\text{mod}}(\omega)$ — 包含附加质量效应;附加质量 $m_a$(传感器附加质量,需结合手册与实物称重获取)
目标:恢复无附加质量的原系统导纳 $Y_0(\omega)$
4.2 导纳修正公式
将系统分解为两个子结构:
- 子结构 A:原自由-自由梁
- 子结构 B:附加集中质量 $m_a$
两者在连接点处满足位移协调和力平衡,推导出速度导纳的修正公式:
$$\boxed{Y_0(\omega) = \frac{Y_{\text{mod}}(\omega)}{1 - j\omega m_a Y_{\text{mod}}(\omega)}}$$
这个公式的推导过程详见附 A。
4.3 实际操作步骤
- 记录附加质量 — 查阅传感器手册,结合实物称重等方式获取总附加质量
- 测量含附加质量的导纳 — 正常进行 FRF 测试
- 逐频率点应用修正公式 — 对每个频率点计算 $Y_0(\omega)$
- 从修正后的导纳提取共振频率 — 修正后的峰值频率即为无附加质量的固有频率
4.4 实测曲线验证
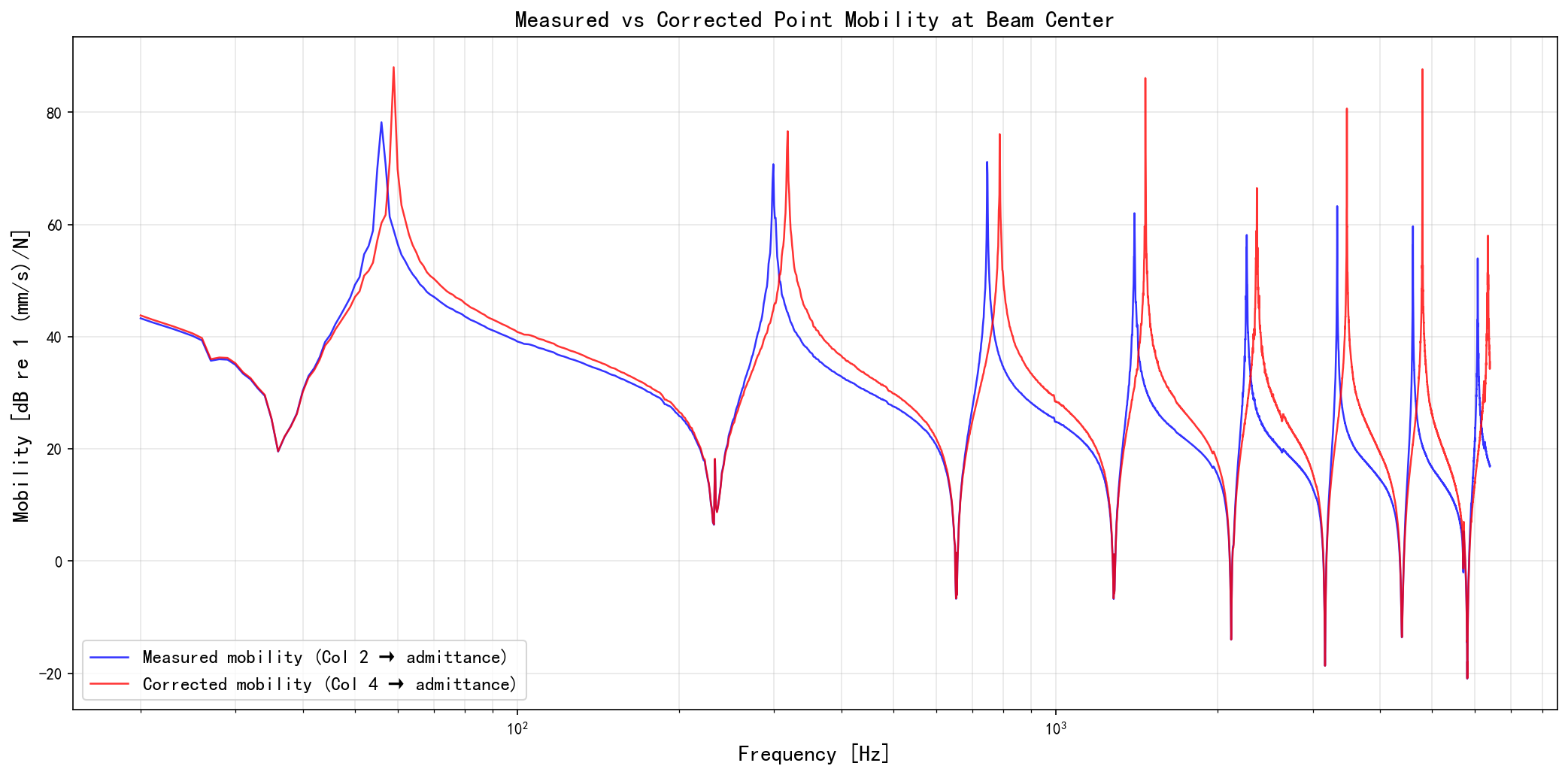
蓝色曲线为实测数据(包含附加质量),红色曲线为修正后的数据(去除了附加质量影响)。可以清晰看到:修正后的共振峰更高、频率更高。 实测数据与仿真结果一致 — 附加质量导致共振频率降低、峰值降低。
| 模态 | 实测 f (Hz) | 修正后 f (Hz) | 修正量 (Hz) |
|---|---|---|---|
| Mode 3 | 56.0 | 59.0 | +3.0 |
| Mode 5 | 299.0 | 318.0 | +19.0 |
| Mode 7 | 746.0 | 787.0 | +41.0 |
| Mode 9 | 1400.0 | 1467.0 | +67.0 |
| Mode 11 | 2263.0 | 2363.0 | +100.0 |
| Mode 13 | 3331.0 | 3472.0 | +141.0 |
| Mode 15 | 4605.0 | 4796.0 | +191.0 |
| Mode 17 | 6074.0 | 6346.0 | +272.0 |
4.5 修正后的导纳曲线与理论预测对比
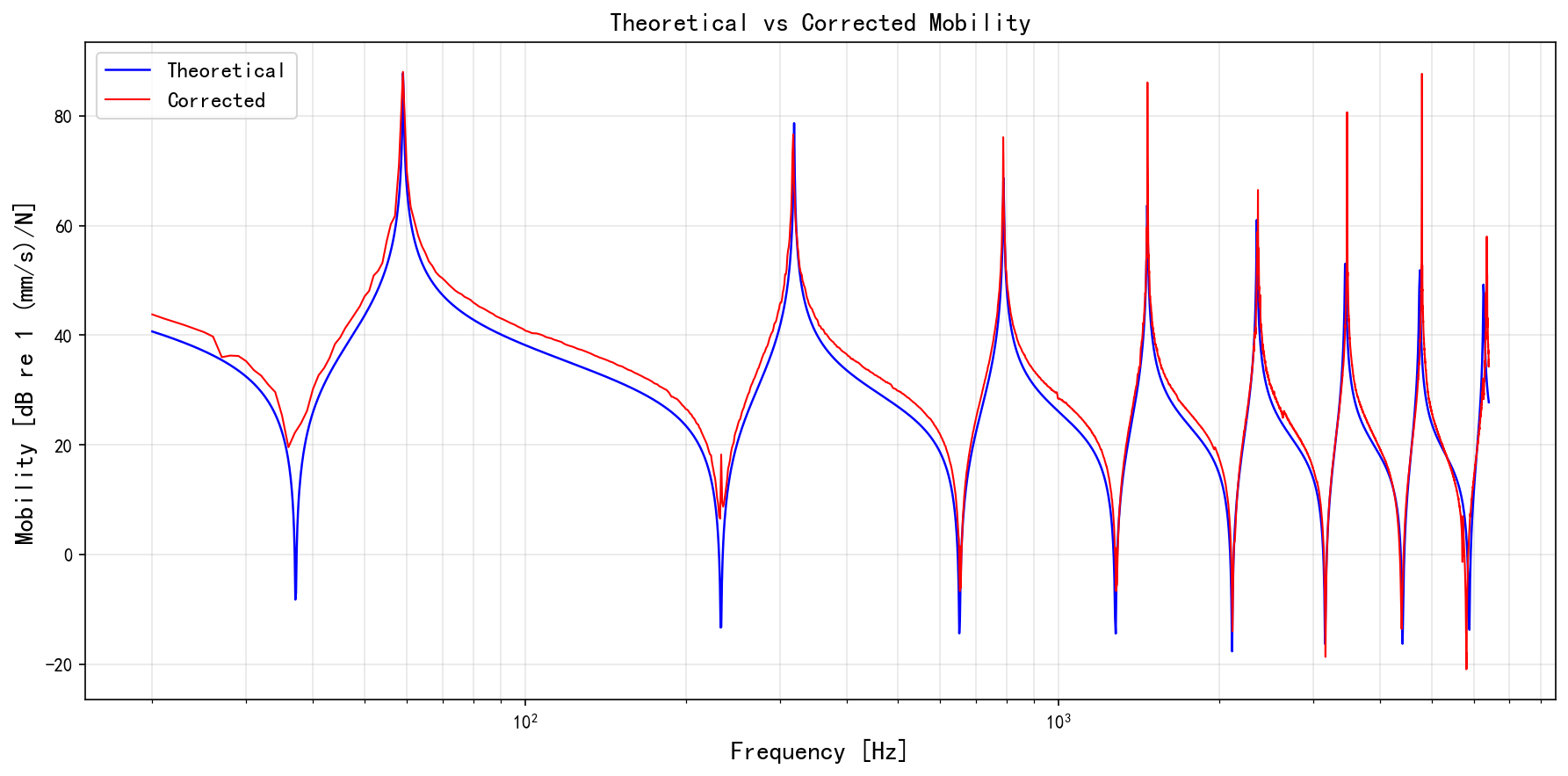
低阶模态(Mode 3~9)修正后频率与理论值偏差小于 0.5%,验证了修正方法的有效性。高阶模态偏差略大(Mode 17 约 1.4%),可能原因包括:实际附加质量略大于 3g、粘结层柔度效应、传感器在高频区的动态质量变化等。
| 模态 | 修正后 f (Hz) | 理论 f₀ (Hz) | 偏差 (Hz) | 偏差 (%) |
|---|---|---|---|---|
| Mode 3 | 59.0 | 59.1 | -0.1 | 0.17% |
| Mode 5 | 318.0 | 319.2 | -1.2 | 0.38% |
| Mode 7 | 787.0 | 788.3 | -1.3 | 0.16% |
| Mode 9 | 1467.0 | 1465.8 | +1.2 | 0.08% |
| Mode 11 | 2363.0 | 2351.8 | +11.2 | 0.48% |
| Mode 13 | 3472.0 | 3446.3 | +25.7 | 0.75% |
| Mode 15 | 4796.0 | 4749.3 | +46.7 | 0.98% |
| Mode 17 | 6346.0 | 6260.7 | +85.3 | 1.36% |
五、工程建议
5.1 附加质量的影响不可忽视
| 附加质量比 | 频率偏移(估算) | 是否可忽略 |
|---|---|---|
| < 1% | < 0.5% | 基本可忽略 |
| 1~5% | 0.5~3% | 精密分析需修正 |
| > 5% | > 3% | 必须修正 |
本实验中附加质量约占总质量 5%,理论频率偏移达 3.8~5.2%(Mode 3 最小,高阶趋于 5.1%),实测偏移约 4~6%。如果不做修正,固有频率的识别会有系统性偏差。
5.2 ISO 16940 标准测试中的注意事项
ISO 16940 自由梁阻尼测试中,附加质量显著地影响共振频率,从而影响后续的等效刚度和隔声量结果。因此,必须进行质量修正,才能得到准确可靠的共振频率。
六、小结
- 附加质量使共振频率降低 — 3g 附加质量让 58.9g 梁的共振频率降低约 4~5%(理论),实测约 4~6%
- 偏移量与振型值成正比 — 贴在波腹处影响最大,节点处无影响
- 频率越高,绝对偏移越大 — Mode 17 理论偏移 319 Hz,实测 272 Hz
- 修正方法简单有效 — $Y_0 = Y_{\text{mod}} / (1 - j\omega m_a Y_{\text{mod}})$,逐点计算即可
- 自由梁测试阻尼时应重视 — 共振频率偏差会传递至等效刚度和隔声量计算,附加质量修正必不可少
附 A:导纳修正公式推导
将附加质量系统分解为两个子结构,在连接点 $x_a$ 处满足位移协调和力平衡:
位移协调: $W_{\text{beam}} = W_{\text{mass}} = W$
力平衡: $F_{\text{ext}} = F_{\text{beam}} + F_{\text{mass}}$
原系统位移导纳 $H_0 = W / F_{\text{beam}}$,附加质量的位移导纳由 $F_{\text{mass}} = -m_a \omega^2 W$ 得 $H_m = W / F_{\text{mass}} = -1/(m_a \omega^2)$。
代入力平衡方程:
$$F_{\text{ext}} = \frac{W}{H_0} + \frac{W}{H_m} \quad \Rightarrow \quad \frac{1}{H_{\text{mod}}} = \frac{1}{H_0} + \frac{1}{H_m} = \frac{1}{H_0} - m_a \omega^2$$
利用速度导纳与位移导纳的关系 $Y = j\omega H$,即 $H = Y/(j\omega)$,代入上式:
$$\frac{j\omega}{Y_{\text{mod}}} = \frac{j\omega}{Y_0} - m_a \omega^2$$
两边同除以 $j\omega$:
$$\frac{1}{Y_{\text{mod}}} = \frac{1}{Y_0} + j\omega m_a = \frac{1 + j\omega m_a Y_0}{Y_0}$$
取倒数即得正向公式(预测附加质量效应):
$$Y_{\text{mod}} = \frac{Y_0}{1 + j\omega m_a Y_0}$$
反演求解 $Y_0$,即得逆向修正公式(从实测数据去除附加质量):
$$\boxed{Y_0 = \frac{Y_{\text{mod}}}{1 - j\omega m_a Y_{\text{mod}}}}$$
同理,由阻抗 $Z = 1/Y$ 可得阻抗域的修正更为简洁:
$$\boxed{Z_0 = Z_{\text{mod}} - j\omega m_a}$$